开箱视频
桌面工具操作指引
一: 设备连接
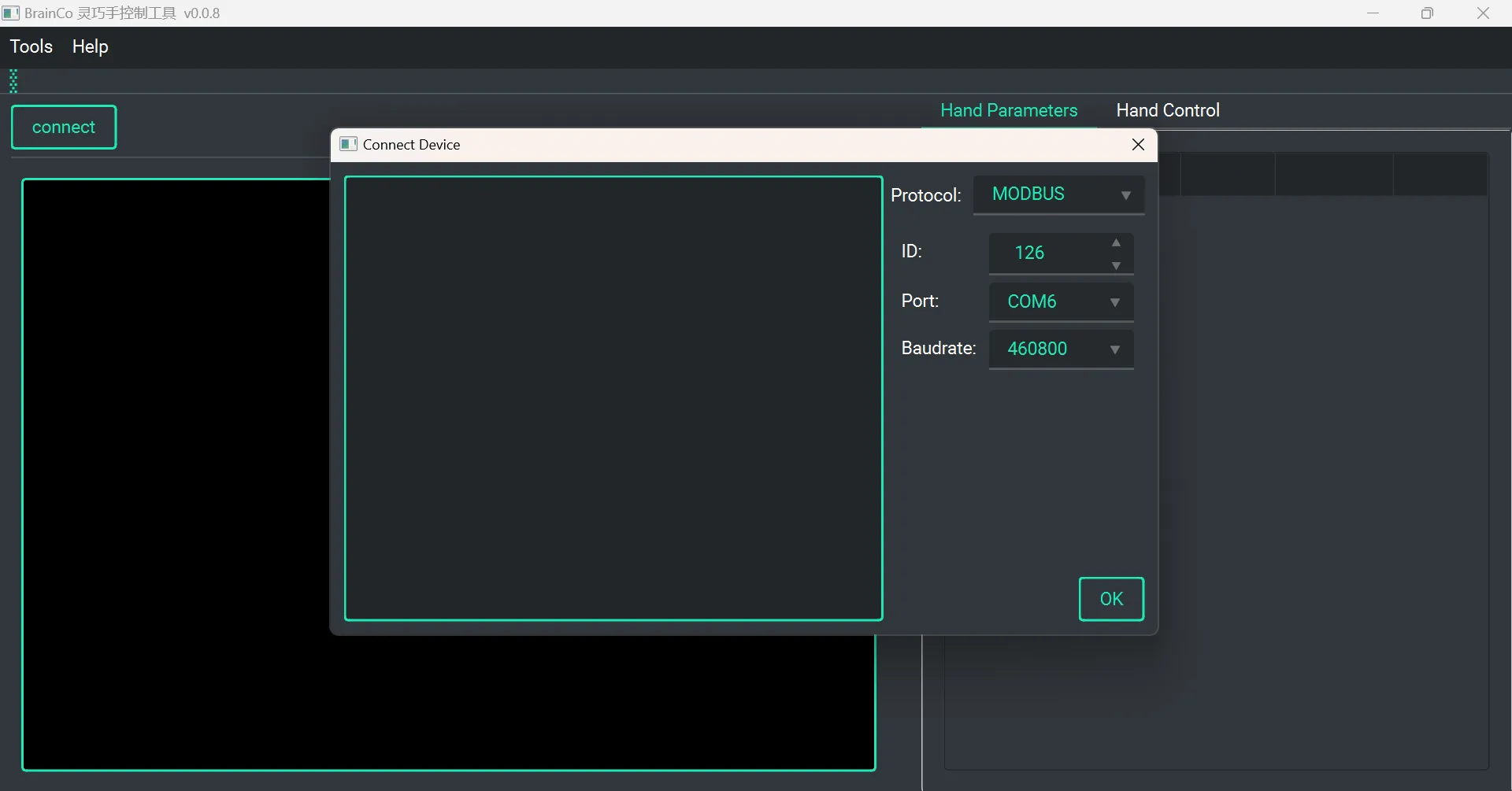
点击【connect】按钮后,弹出设备配置界面,选择对应的设备ID, 端口号, 波特率之后点击【ok】按钮。打开【Broadcast】后将会使用广播方式下发指令。
TIP
- 左手默认ID126,右手默认ID127
- 非广播模式下桌面工具会自动检测连接状态,若连接失败请检查端口号是否设置正确。
- 若自动连接失败, 可尝试重新插拔485转串口模块或重启灵巧手。 无效后可点击【Check】按钮全检查id, 注意此操作可能会持续一段时间(10分钟左右)。
二: 手势控制
设备连接成功后, 点击【Motor】按钮弹出手势控制界面。
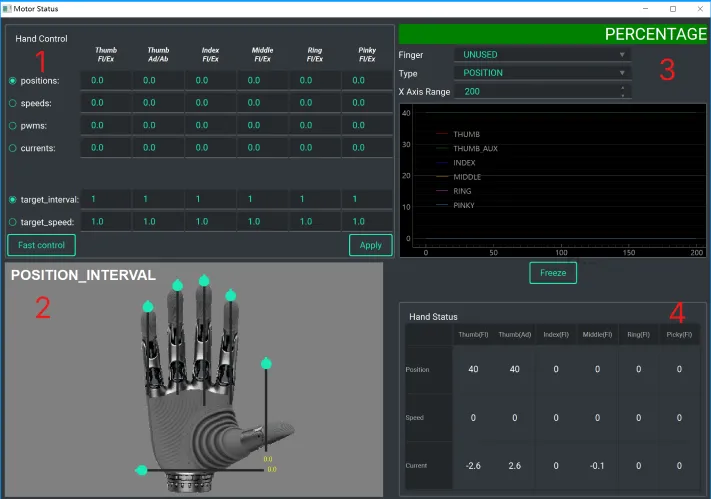
区域1:输入参数控制手势, 可选择位置(0 - 100)、速度(-100, 100)、PWM和电流多种控制模式.
区域2: 拖动滑动条控制手指位置
区域3: 实时显示手指控制曲线, 可切换查看不同手指的
位置,速度,电流曲线区域4: 实时显示手指的当前参数
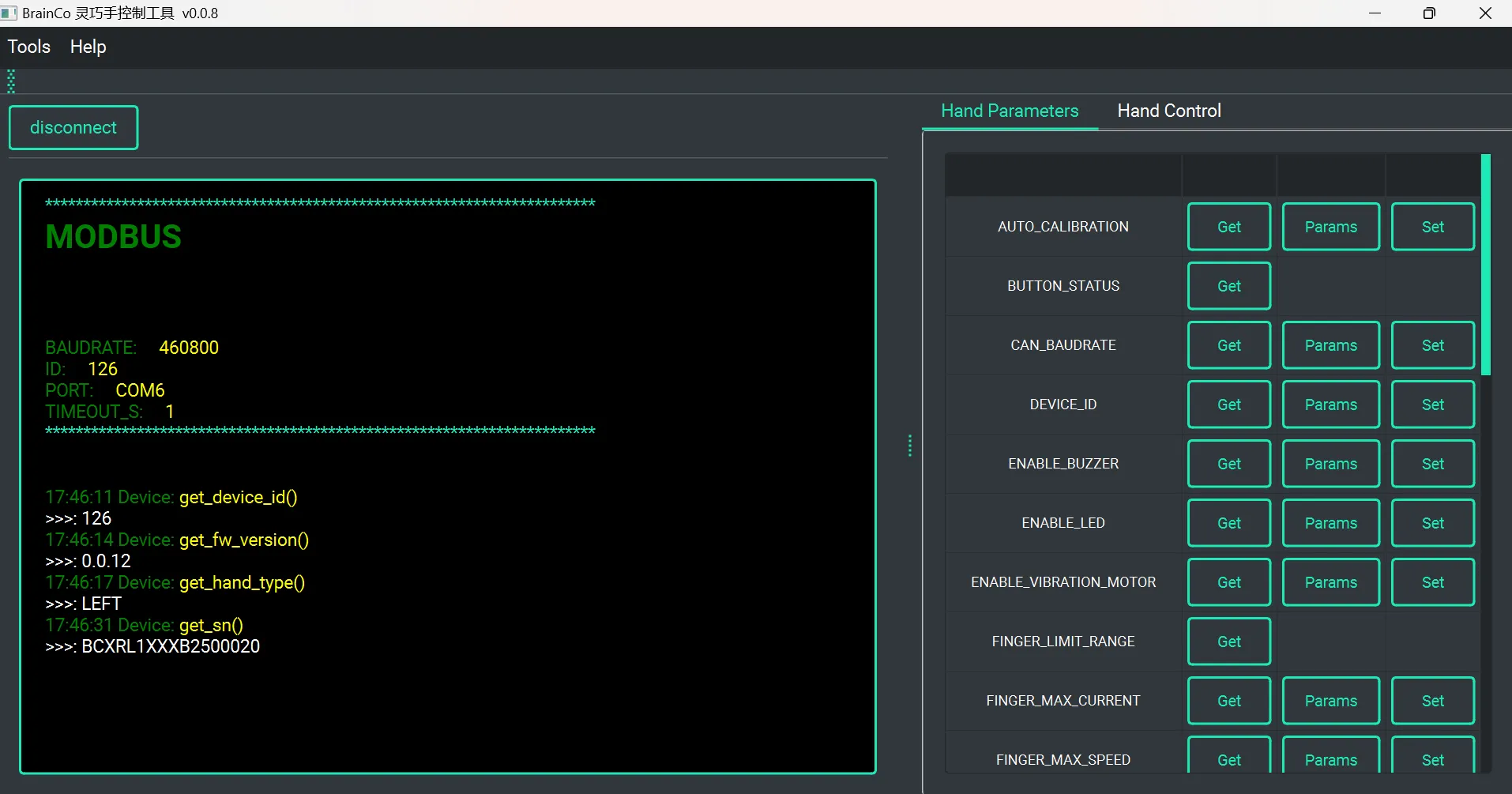
三: 参数设置
设备连接成功后, 切换标签页【Hand Parameters】, 可设置/获取设备相应参数, 左侧【指令显示区域】会显示下发/接收的指令信息。
四: 手势动作序列
设备连接成功后, 点击【Action Sequence】按钮弹出手势动作序列界面。
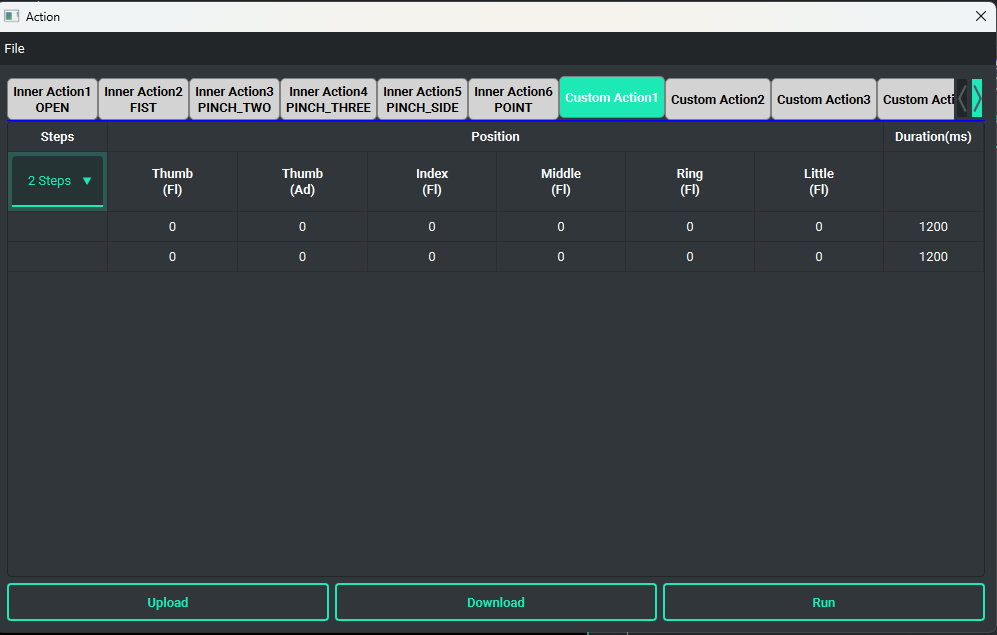
4.1 动作序列设置
包含6个内置动作序列(张开、握拳、两指捏、三指捏、侧边捏、单指点),以及6个自定义动作序列。 每套动作序列最多支持32步分解动作, 每步动作的手指位置都可单独设置。
手指位置: 设置动作序列的某一步骤的手指目标位置(0 - 100)
持续时长: 设置动作序列的某一步骤的持续时间
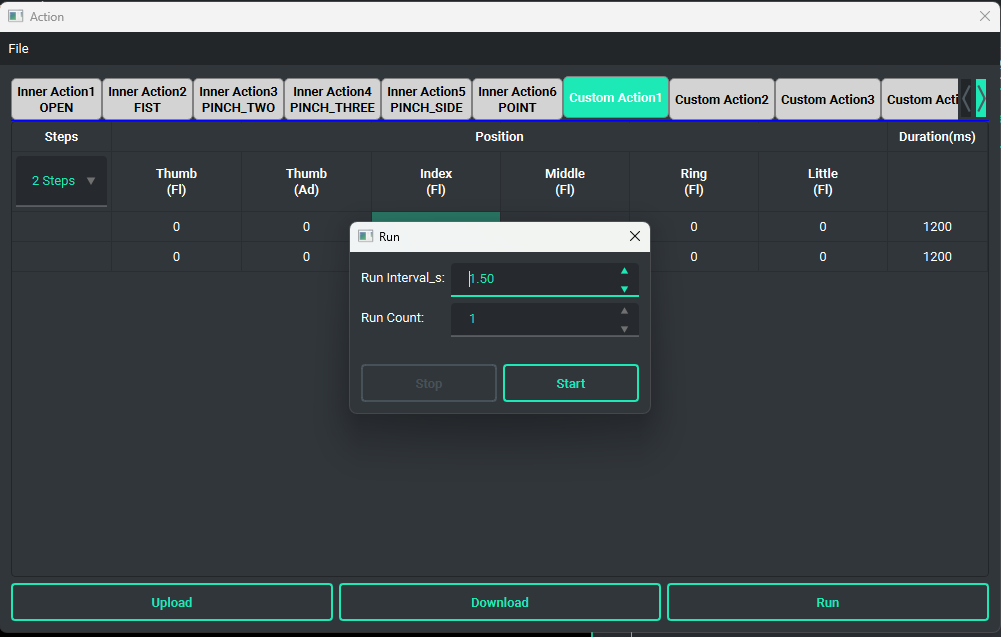
动作序列数据设置已完成后, 点击表格下方【Download】按钮, 将表格数据下载到灵巧手中(灵巧手关机后将擦除设置信息)。
点击【Upload】按钮, 上位机会读取灵巧手中相应的动作序列并显示在表格上。
点击【Run】按钮, 控制灵巧手触发相应的动作序列并进行运动。
Run Interval_s: 每次运行动作序列之间的间隔时间(秒)
Run Count: 动作序列的运行次数
4.2 离线配置文件
点击菜单 File->Open,打开一份动作序列文件,并显示在桌面工具的动作序列数据表格区域。
点击菜单 File->Save As...,将表格显示的动作序列数据保存到指定的文件中。
五: OTA
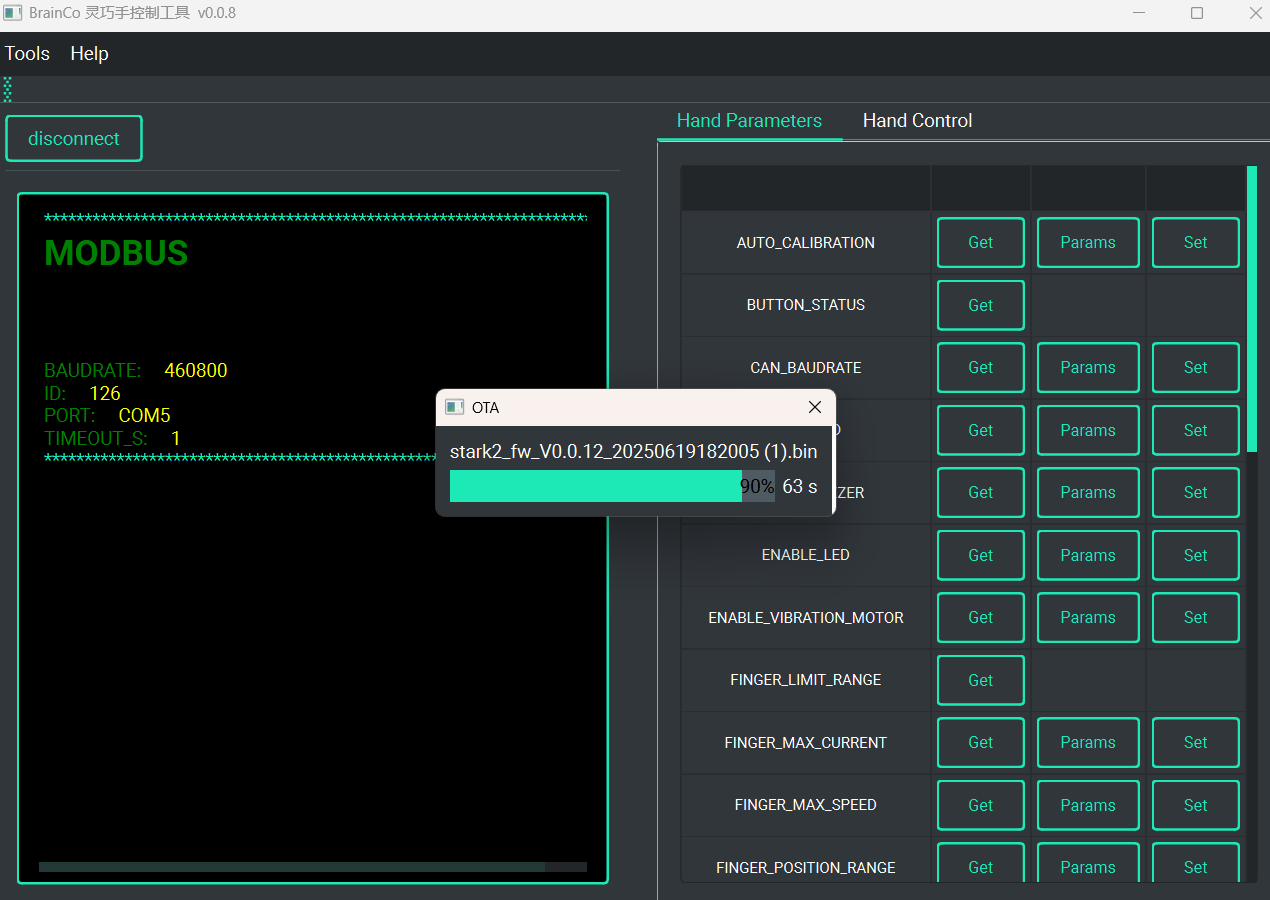
设备连接成功后, 点击菜单栏 Tools->OTA, 选择OTA文件即可。
桌面工具固件升级教程
设备连接
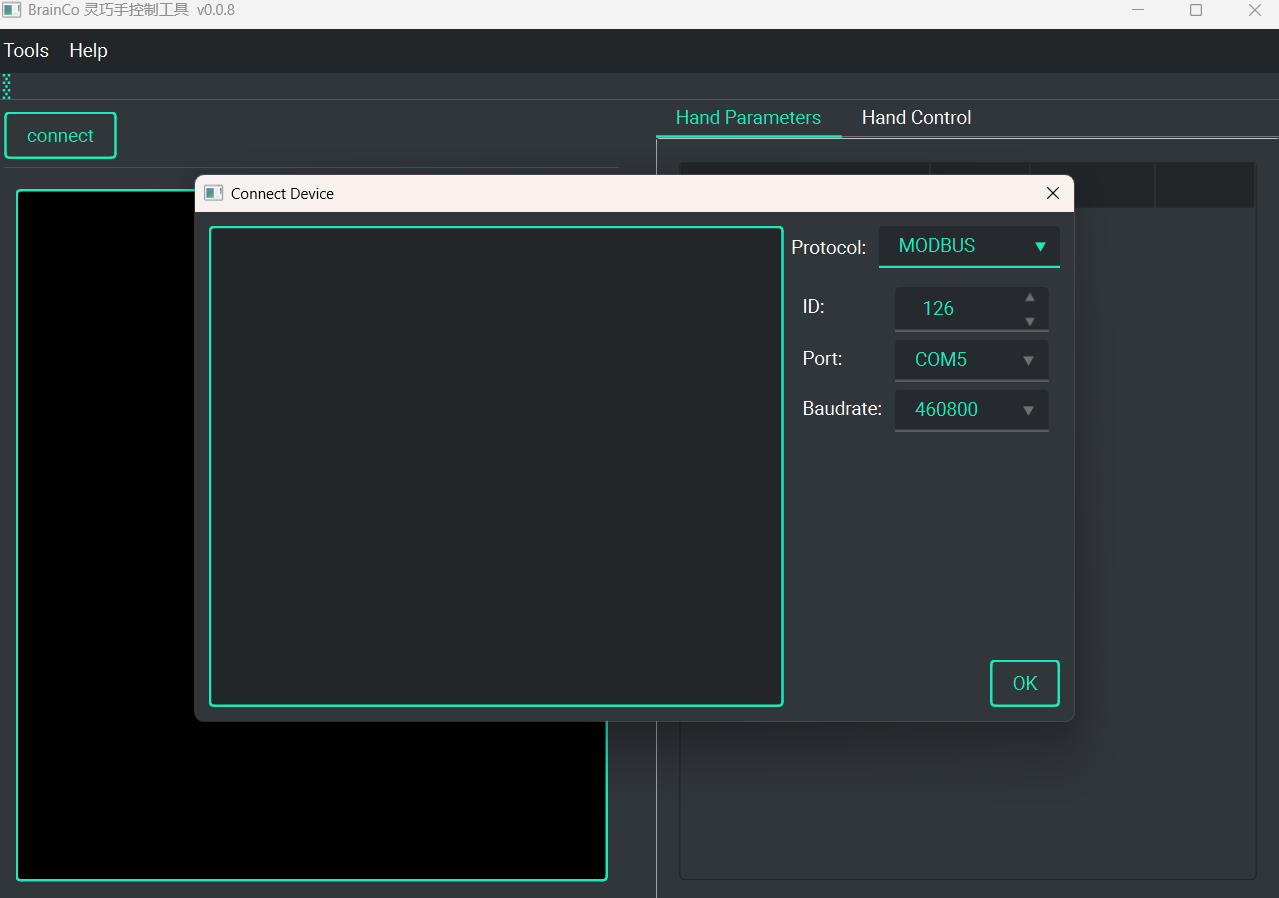
点击【connect】按钮后,弹出设备配置界面,选择对应的设备ID”,端口号”, `波特率”之后点击【ok】按钮。
TIP
- 非广播模式下桌面工具会自动检测连接状态,若连接失败请检查端口号是否设置正确。
- 若自动连接失败, 可尝试重新插拔 485 转串口模块或重启灵巧手。 无效后可点击【Check】按钮全检查 id, 注意此操作可能会持续一段时间(10 分钟左右)。
OTA-固件升级
WARNING
设备连接成功后,点击菜单栏 Tools -> OTA,选择 OTA 文件即可。升级结束后需重启桌面工具。
联系方式
如有问题或购买需求,请联系 BrainCo 灵巧手团队或者通过页面帮助入口提交工单。