Revo 2 灵巧手驱动包-- Modbus / CAN FD
概述
BrainCo Hand Driver 驱动包为 BrainCo Revo 2 灵巧手提供基于 Modbus/CAN FD 通信协议的 ROS 2 硬件接口。该功能包实现了 ros2_control 硬件接口,支持通过串口或 CAN FD 对 6 个手指关节进行实时控制和状态监控。
通信协议支持:
- Modbus(默认):通过串口通信,兼容性好,部署简单
- CAN FD:支持同时控制多只手,需 ZLG CAN FD 硬件设备
特性
- 通信协议:支持 Modbus 和 CAN FD 双协议
- ros2_control 集成:ros2_control 硬件接口实现
- 双手支持:支持左手和右手配置,以及双手同时控制
- MoveIt 集成:可选的 MoveIt 集成用于运动规划
- 实时控制:高频控制循环,实现精确的手指操控
- 状态反馈:所有关节的位置、速度反馈
- 轨迹控制:关节轨迹控制器支持,实现平滑运动执行
- 自动检测:支持 Modbus 自动检测串口和从站 ID(仅单手模式)
环境系统
- Ubuntu 22.04
- ROS 2 (Humble)
- Python 3.8+
Modbus 模式(默认)
- Modbus 串口设备(如 /dev/ttyUSB0)
CAN FD 模式(可选)
- ZLG USB-CAN FD 设备(如 USBCANFD-200U)
- ZLG CAN FD 驱动库(已随包内置)
- CAN FD 总线连接
安装和设置
1. 依赖项
确保已安装以下软件包:
# ROS 2 依赖项
sudo apt install ros-humble-controller-manager ros-humble-joint-trajectory-controller
sudo apt install ros-humble-joint-state-broadcaster ros-humble-robot-state-publisher
sudo apt install ros-humble-moveit ros-humble-moveit-ros-planning-interface
# Python 依赖项
pip3 install rclpy trajectory_msgs sensor_msgs control_msgs2. BrainCo Stark SDK
BrainCo Stark SDK 在 vendor/ 目录中,可直接使用。如需更新 SDK 版本,可运行:
cd brainco_hardware/brainco_hand_driver
./scripts/download_sdk.sh3. 构建工作空间
# 进入工作空间
cd ~/brainco_ws
# 安装依赖项
rosdep install --ignore-src --from-paths src -y -r
# 构建功能包
colcon build --packages-select brainco_hand_driver --symlink-install
# Source 工作空间
source install/setup.bash4. 验证安装
# 检查功能包是否可用
ros2 pkg list | grep brainco_hand_driver
# 检查串口设备权限
ls -l /dev/ttyUSB*
# 如果权限不足,将用户添加到 dialout 组:
sudo usermod -a -G dialout $USER
# 然后重新登录硬件连接
Modbus 串口设置
在使用驱动之前,请确保您的 Modbus 串口设置正确:
# 检查串口设备
ls -l /dev/ttyUSB*
# 检查串口权限
groups | grep dialout
# 如果没有权限,添加用户到 dialout 组
sudo usermod -a -G dialout $USER
# 重新登录后生效
# 测试串口连接(可选)
sudo apt install minicom
sudo minicom -D /dev/ttyUSB0快速开始
启动右手系统
# Modbus 模式(默认)
ros2 launch brainco_hand_driver revo2_system.launch.py hand_type:=right
# CAN FD 模式(需要 ZLG USB-CAN FD 设备)
ros2 launch brainco_hand_driver revo2_system.launch.py hand_type:=right protocol:=canfd启动左手系统
# Modbus 模式(默认)
ros2 launch brainco_hand_driver revo2_system.launch.py hand_type:=left
# CAN FD 模式(需要 ZLG USB-CAN FD 设备)
ros2 launch brainco_hand_driver revo2_system.launch.py hand_type:=left protocol:=canfd启动 MoveIt 集成
# 右手带 MoveIt(Modbus 模式)
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=right
# 右手带 MoveIt(CAN FD 模式)
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=right protocol:=canfd
# 左手带 MoveIt(Modbus 模式)
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=left
# 左手带 MoveIt(CAN FD 模式)
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=left protocol:=canfd启动双手系统(MoveIt)
# 双手系统 Modbus 模式(默认)
ros2 launch brainco_hand_driver dual_revo2_real_moveit.launch.pyLaunch 参数
| 参数 | 默认值 | 描述 |
|---|---|---|
hand_type | right | 手型选择:left 或 right |
protocol | modbus | 通信协议:modbus 或 canfd |
protocol_config_file | "" | 协议配置文件(YAML),留空则使用默认配置 |
控制接口
使用 Topic 接口
右手轨迹控制示例:
ros2 topic pub --once /right_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [{
positions: [0.5, 0.5, 0.5, 0.5, 0.5, 0.5],
time_from_start: {sec: 2}
}]
}'左手轨迹控制示例:
ros2 topic pub --once /left_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [{
positions: [0.5, 0.5, 0.5, 0.5, 0.5, 0.5],
time_from_start: {sec: 2}
}]
}'使用 Action 接口
右手 Action 控制示例:
ros2 action send_goal /right_revo2_hand_controller/follow_joint_trajectory \
control_msgs/action/FollowJointTrajectory \
'{
trajectory: {
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [
{
positions: [0.5, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
},
{
positions: [0.5, 0.0, 1.4, 0.0, 0.0, 0.0],
time_from_start: {sec: 2}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 0.0, 0.0],
time_from_start: {sec: 3}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 0.0],
time_from_start: {sec: 4}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 1.4],
time_from_start: {sec: 5}
}
]
}
}'左手 Action 控制示例:
ros2 action send_goal /left_revo2_hand_controller/follow_joint_trajectory \
control_msgs/action/FollowJointTrajectory \
'{
trajectory: {
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [
{
positions: [0.5, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
},
{
positions: [0.5, 0.0, 1.4, 0.0, 0.0, 0.0],
time_from_start: {sec: 2}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 0.0, 0.0],
time_from_start: {sec: 3}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 0.0],
time_from_start: {sec: 4}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 1.4],
time_from_start: {sec: 5}
}
]
}
}'归零位置(Home Position)
返回归零位置:
# 右手
ros2 topic pub --once /right_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [{
positions: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
}]
}'
# 左手
ros2 topic pub --once /left_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [{
positions: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
}]
}'使用 MoveIt 控制灵巧手
MoveIt 提供了图形化界面,可以方便地规划和执行灵巧手的运动。
启动 MoveIt
首先启动 MoveIt 集成:
# 启动右手 MoveIt
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=right
# 或启动左手 MoveIt
ros2 launch brainco_hand_driver revo2_real_moveit.launch.py hand_type:=left
# 或启动双手 MoveIt
ros2 launch brainco_hand_driver dual_revo2_real_moveit.launch.py \
left_port:=/dev/ttyUSB0 \
right_port:=/dev/ttyUSB1启动后,RViz 会自动打开并显示灵巧手的可视化界面。
1. 选择运动组
在 RViz 的左侧面板中,找到 "Motion Planning" 插件。首先需要选择要控制的运动组:
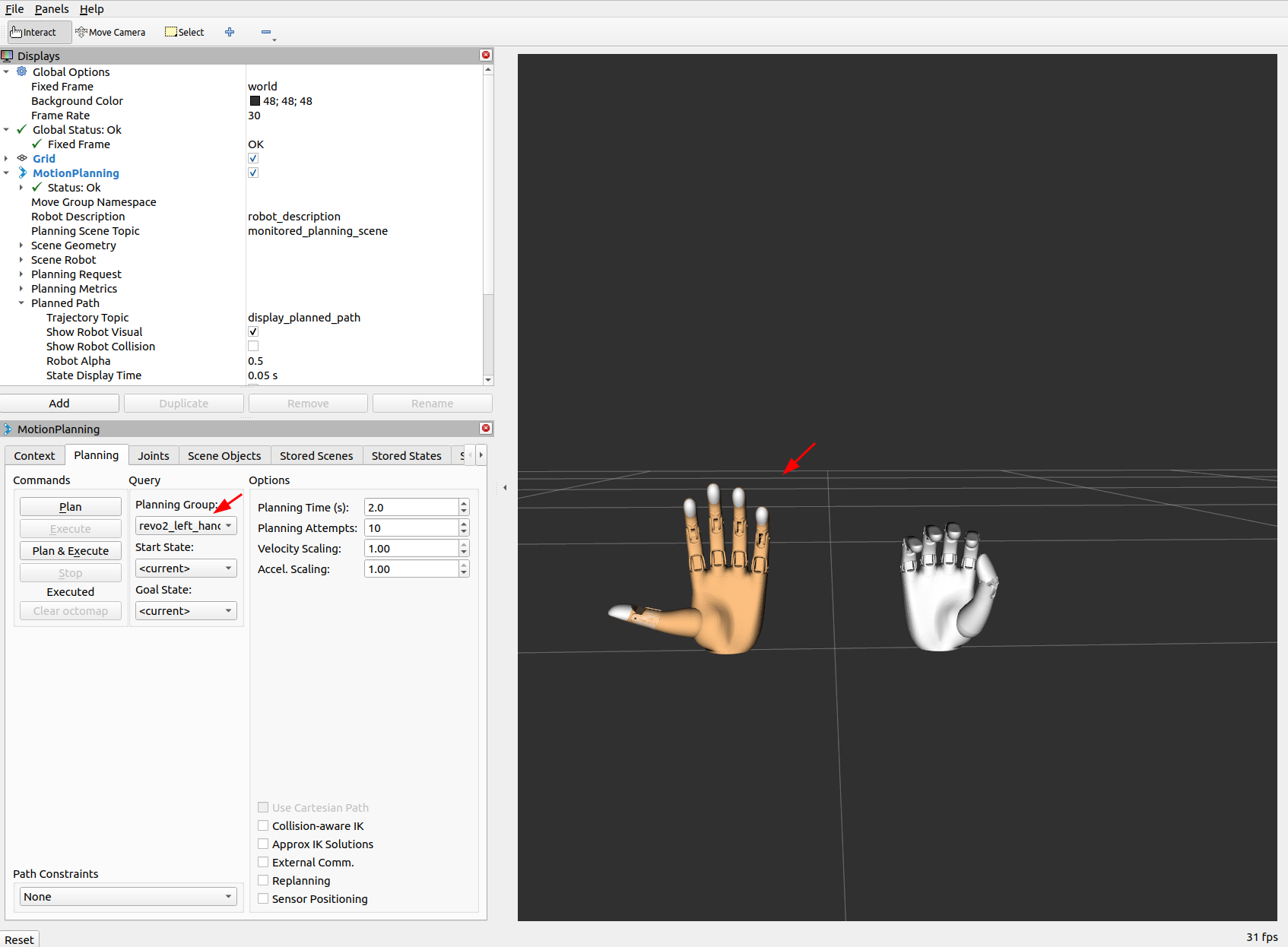
- 对于单手模式:选择
revo2_left_hand或revo2_right_hand - 对于双手模式:可以选择
revo2_left_hand或revo2_right_hand分别控制左右手
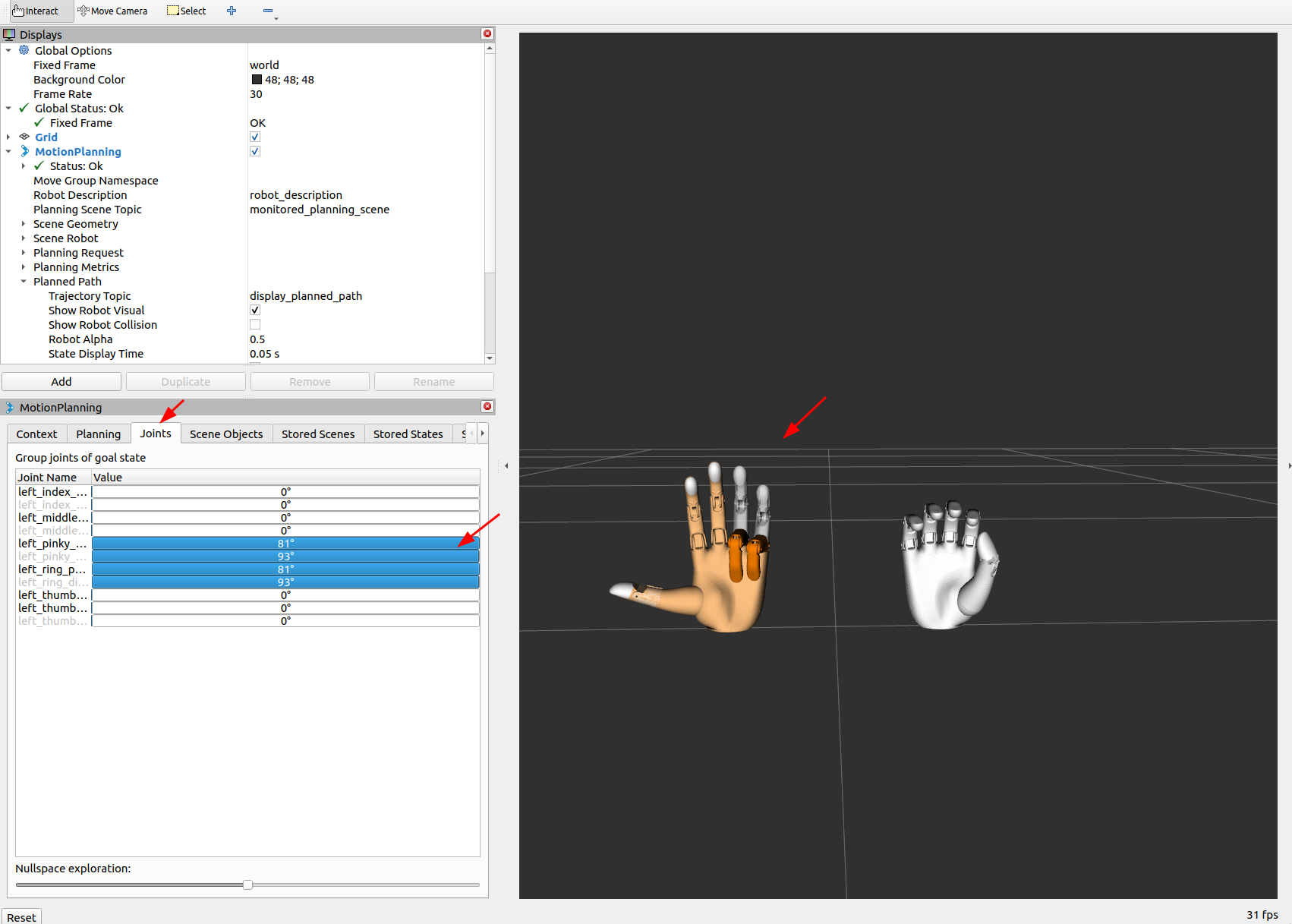
2. 设置目标
在 "Motion Planning" 面板中,切换到 "Planning" 标签页,然后点击 "Query" 下的 "Select Goal State" 或直接使用 "Joint Values" 标签:
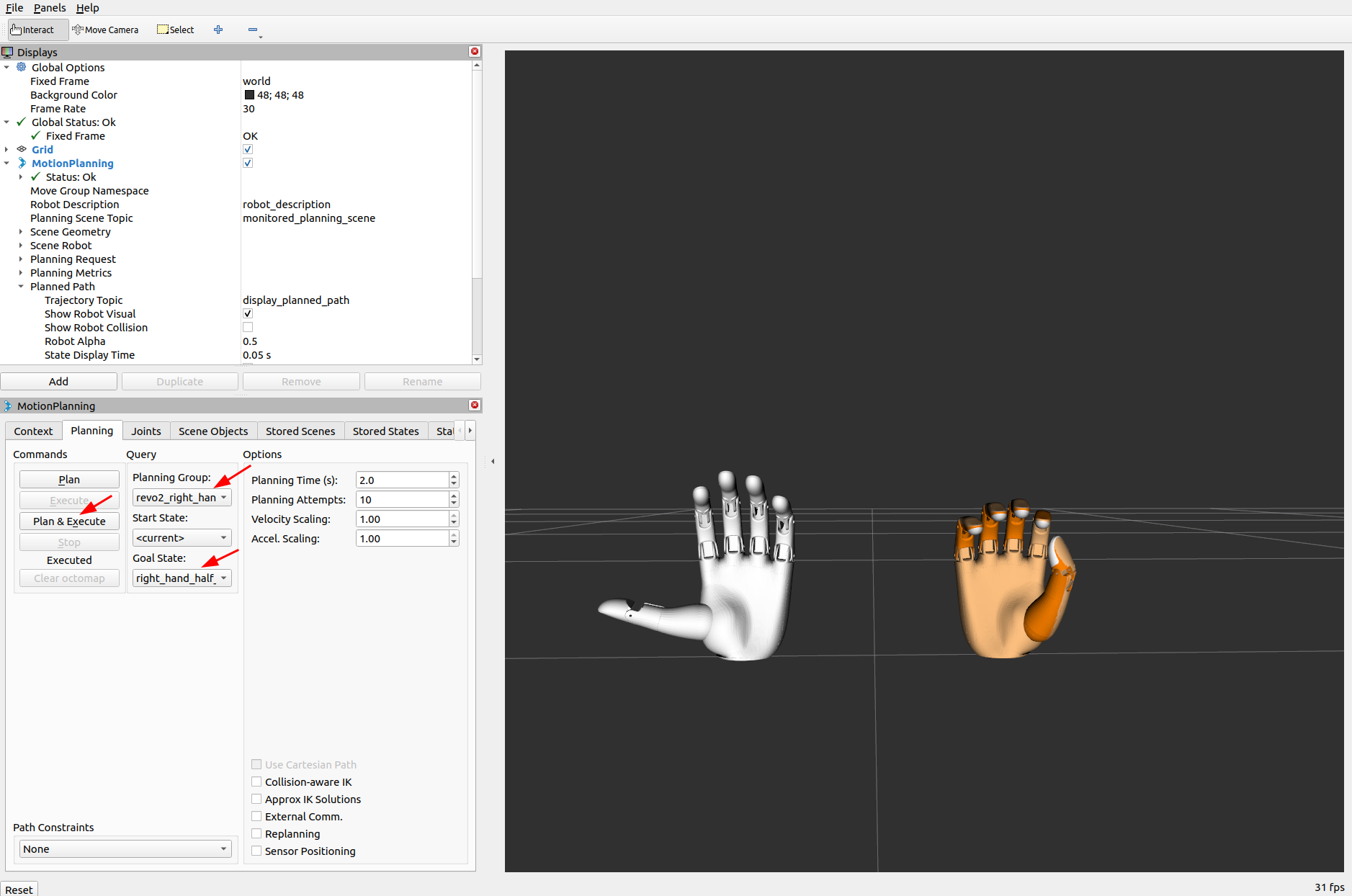
MoveIt 提供了预定义的姿态,通过 config/xxx.srdf 定义和加载,可以在 "Planning" 标签页的 "Query" 部分选择:
- hand_open:张开手
- hand_half_close:半握
- hand_close:握拳
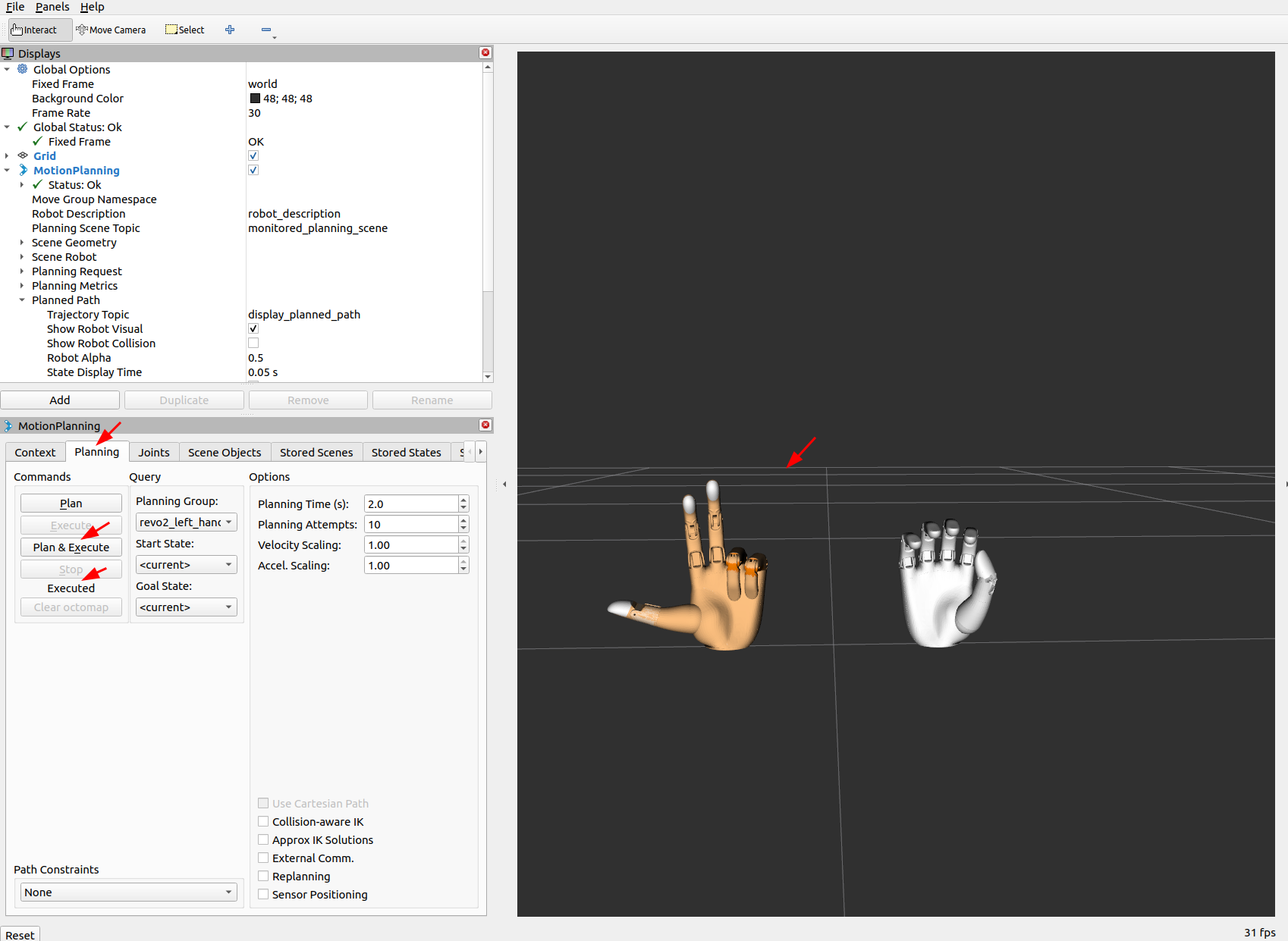
3. 规划并执行运动
设置好目标后,点击 "Plan & Execute" 按钮进行规划并执行:
- Plan:规划从当前位置到目标位置的运动轨迹
- Execute:执行规划好的轨迹,控制真实灵巧手运动
- Plan & Execute:自动规划并执行
规划成功后,您可以在 RViz 中看到:
- 绿色轨迹:规划的运动路径
- 橙色轨迹:已执行的路径
4. 执行结果
点击 "Execute" 后,MoveIt 会将轨迹发送给控制器,真实灵巧手会按照规划的轨迹运动:
执行过程中,您可以:
- 在 RViz 中实时观察灵巧手的运动
- 通过
/joint_states话题监控关节状态 - 使用
ros2 topic echo /joint_states查看详细的关节反馈
监控和调试
检查系统状态
# 列出所有运行的节点
ros2 node list
# 列出所有控制器
ros2 control list_controllers
# 检查硬件组件
ros2 control list_hardware_components
# 检查硬件接口
ros2 control list_hardware_interfaces
# 列出所有话题
ros2 topic list
# 列出所有动作
ros2 action list
# 监控关节状态
ros2 topic echo /joint_states预期的输出
核心节点列表(右手配置)
/controller_manager
/joint_state_broadcaster
/right_revo2_hand_controller
/robot_state_publisher控制器状态
joint_state_broadcaster joint_state_broadcaster/JointStateBroadcaster active
right_revo2_hand_controller joint_trajectory_controller/JointTrajectoryController active硬件组件(右手配置)
Hardware Component 1
name: Revo2RightSystem
type: system
plugin name: brainco_hand_driver/BraincoHandHardware
state: id=3 label=active
command interfaces
right_thumb_proximal_joint/position [available] [claimed]
right_thumb_metacarpal_joint/position [available] [claimed]
right_index_proximal_joint/position [available] [claimed]
right_middle_proximal_joint/position [available] [claimed]
right_ring_proximal_joint/position [available] [claimed]
right_pinky_proximal_joint/position [available] [claimed]硬件接口(右手配置)
command interfaces
right_index_proximal_joint/position [available] [claimed]
right_middle_proximal_joint/position [available] [claimed]
right_pinky_proximal_joint/position [available] [claimed]
right_ring_proximal_joint/position [available] [claimed]
right_thumb_metacarpal_joint/position [available] [claimed]
right_thumb_proximal_joint/position [available] [claimed]
state interfaces
right_index_proximal_joint/position
right_index_proximal_joint/velocity
right_middle_proximal_joint/position
right_middle_proximal_joint/velocity
right_pinky_proximal_joint/position
right_pinky_proximal_joint/velocity
right_ring_proximal_joint/position
right_ring_proximal_joint/velocity
right_thumb_metacarpal_joint/position
right_thumb_metacarpal_joint/velocity
right_thumb_proximal_joint/position
right_thumb_proximal_joint/velocity核心话题列表(右手配置)
/joint_states
/right_revo2_hand_controller/joint_trajectory
/robot_description
/tf
/tf_static核心动作列表(右手配置)
/right_revo2_hand_controller/follow_joint_trajectory关节映射
右手关节
| 关节名称 | 描述 | 角度范围(弧度) | 最大角度(度) |
|---|---|---|---|
right_thumb_proximal_joint | 拇指近端关节 | 0 ~ 1.03 | 59 |
right_thumb_metacarpal_joint | 拇指掌骨关节 | 0 ~ 1.57 | 90 |
right_index_proximal_joint | 食指近端关节 | 0 ~ 1.41 | 81 |
right_middle_proximal_joint | 中指近端关节 | 0 ~ 1.41 | 81 |
right_ring_proximal_joint | 无名指近端关节 | 0 ~ 1.41 | 81 |
right_pinky_proximal_joint | 小指近端关节 | 0 ~ 1.41 | 81 |
左手关节
| 关节名称 | 描述 | 角度范围(弧度) | 最大角度(度) |
|---|---|---|---|
left_thumb_proximal_joint | 拇指近端关节 | 0 ~ 1.03 | 59 |
left_thumb_metacarpal_joint | 拇指掌骨关节 | 0 ~ 1.57 | 90 |
left_index_proximal_joint | 食指近端关节 | 0 ~ 1.41 | 81 |
left_middle_proximal_joint | 中指近端关节 | 0 ~ 1.41 | 81 |
left_ring_proximal_joint | 无名指近端关节 | 0 ~ 1.41 | 81 |
left_pinky_proximal_joint | 小指近端关节 | 0 ~ 1.41 | 81 |
功能包结构
brainco_hand_driver/
├── launch/ # Launch 文件
│ ├── revo2_system.launch.py # 主系统启动文件
│ ├── revo2_real_moveit.launch.py # MoveIt 集成启动文件(单手)
│ └── dual_revo2_real_moveit.launch.py # MoveIt 集成启动文件(双手)
├── config/ # 配置文件
│ ├── protocol_*.yaml # 协议配置文件(Modbus/CAN FD)
│ ├── xxx.srdf # MoveIt 语义描述文件
│ ├── xxx.urdf.xacro # URDF XACRO 文件
│ ├── xxx.ros2_control.xacro # ros2_control 配置
│ ├── xxx_controllers.yaml # 控制器配置
│ ├── xxx_initial_positions.yaml # 初始位置配置
│ └── ... # 其他配置文件
├── include/ # 头文件
│ └── brainco_hand_driver/ # 驱动头文件
│ ├── brainco_hand_hardware.hpp # 硬件接口头文件
│ └── logger_macros.hpp # 日志宏定义
├── src/ # 源文件
│ └── brainco_hand_hardware.cpp # 硬件接口实现
├── scripts/ # 工具脚本
│ └── download_sdk.sh # SDK 下载脚本
├── vendor/ # BrainCo Stark SDK
│ └── dist/ # SDK 分发文件
├── CMakeLists.txt # 构建配置
├── package.xml # 功能包描述
├── brainco_hand_driver_plugins.xml # 插件描述
└── README.md # 英文说明Revo 2 灵巧手驱动包 -- EtherCAT
概述
BrainCo Hand EtherCAT 驱动包为 BrainCo Revo 2 灵巧手提供基于 EtherCAT 通信协议的 ROS 2 硬件接口。该功能包实现了 ros2_control 硬件接口,支持通过 EtherCAT 主站对 6 个手指关节进行实时控制和状态监控。
特性
- EtherCAT 通信:与 Revo 2 灵巧手硬件的实时 EtherCAT 通信
- ros2_control 集成:ros2_control 硬件接口实现
- 双手支持:支持左手和右手配置
- MoveIt 集成:可选的 MoveIt 集成用于运动规划
- 实时控制:高频控制循环,实现精确的手指操控
- 状态反馈:所有关节的位置、速度反馈
- 轨迹控制:关节轨迹控制器支持,实现平滑运动执行
环境系统
- Ubuntu 22.04
- ROS 2 (Humble)
- EtherCAT 主站 (IgH EtherCAT Master)
- Python 3.8+
安装和设置
1. 依赖项
确保已安装以下软件包:
# ROS 2 依赖项
sudo apt install ros-humble-controller-manager ros-humble-joint-trajectory-controller
sudo apt install ros-humble-joint-state-broadcaster ros-humble-robot-state-publisher
# Python 依赖项
pip3 install rclpy trajectory_msgs sensor_msgs control_msgs
# EtherCAT 主站(如果尚未安装)
# 请按照系统的 EtherCAT 主站安装指南进行安装2. 构建工作空间
# 进入工作空间
cd ~/brainco_ws
# 安装依赖项
rosdep install --ignore-src --from-paths src -y -r
# 构建功能包
colcon build --packages-select brainco_hand_ethercat_driver stark_ethercat_interface stark_ethercat_driver --symlink-install
# Source 工作空间
source install/setup.bash3. 验证安装
# 检查功能包是否可用
ros2 pkg list | grep brainco_hand_ethercat_driver
# 检查 EtherCAT 主站状态
sudo systemctl status ethercat硬件连接
EtherCAT 设置
在使用驱动之前,请确保您的 EtherCAT 设置正确:
# 检查网络接口
ip link show
# 检查 EtherCAT 主站状态
sudo systemctl status ethercat
# 检查 EtherCAT 从站设备
sudo ethercat slaves
# 检查设备 SDO/PDO 信息
sudo ethercat sdos
sudo ethercat pdos快速开始
启动右手系统
ros2 launch brainco_hand_ethercat_driver revo2_system.launch.py hand_type:=right启动左手系统
ros2 launch brainco_hand_ethercat_driver revo2_system.launch.py hand_type:=left# 过滤域信息输出
ros2 launch brainco_hand_ethercat_driver revo2_system.launch.py 2>&1 | grep -v "\[ros2_control_node-1\] Domain"启动 MoveIt 集成
# 右手带 MoveIt
ros2 launch brainco_hand_ethercat_driver revo2_real_moveit.launch.py hand_type:=right
# 左手带 MoveIt
ros2 launch brainco_hand_ethercat_driver revo2_real_moveit.launch.py hand_type:=leftLaunch 参数
基础系统参数(revo2_system.launch.py)
| 参数 | 默认值 | 描述 |
|---|---|---|
hand_type | right | 手型选择:left 或 right |
prefix | "" | 关节名称前缀,用于多机器人设置 |
ctrl_param_duration_ms | 20 | 运动时间参数,单位毫秒(1ms = 最快速度) |
robot_controller | 自动生成 | 控制器名称(根据 hand_type 自动生成) |
MoveIt 集成参数(revo2_real_moveit.launch.py)
| 参数 | 默认值 | 描述 |
|---|---|---|
hand_type | right | 手型选择:left 或 right |
ctrl_param_duration_ms | 10 | 运动时间参数,单位毫秒(1ms = 最快速度) |
use_rviz | true | 是否启动 RViz 可视化 |
publish_monitored_planning_scene | true | 是否发布监控的规划场景 |
控制接口
使用 Topic 接口
右手轨迹控制示例:
ros2 topic pub --once /right_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [{
positions: [0.5, 0.5, 0.5, 0.5, 0.5, 0.5],
time_from_start: {sec: 2}
}]
}'左手轨迹控制示例:
ros2 topic pub --once /left_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [{
positions: [0.5, 0.5, 0.5, 0.5, 0.5, 0.5],
time_from_start: {sec: 2}
}]
}'使用 Action 接口
右手 Action 控制示例:
ros2 action send_goal /right_revo2_hand_controller/follow_joint_trajectory \
control_msgs/action/FollowJointTrajectory \
'{
trajectory: {
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [
{
positions: [0.5, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
},
{
positions: [0.5, 0.0, 1.4, 0.0, 0.0, 0.0],
time_from_start: {sec: 2}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 0.0, 0.0],
time_from_start: {sec: 3}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 0.0],
time_from_start: {sec: 4}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 1.4],
time_from_start: {sec: 5}
}
]
}
}'左手 Action 控制示例:
ros2 action send_goal /left_revo2_hand_controller/follow_joint_trajectory \
control_msgs/action/FollowJointTrajectory \
'{
trajectory: {
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [
{
positions: [0.5, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
},
{
positions: [0.5, 0.0, 1.4, 0.0, 0.0, 0.0],
time_from_start: {sec: 2}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 0.0, 0.0],
time_from_start: {sec: 3}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 0.0],
time_from_start: {sec: 4}
},
{
positions: [0.5, 0.0, 1.4, 1.4, 1.4, 1.4],
time_from_start: {sec: 5}
}
]
}
}'归零位置(Home Position)
返回归零位置:
# 右手
ros2 topic pub --once /right_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"right_thumb_proximal_joint",
"right_thumb_metacarpal_joint",
"right_index_proximal_joint",
"right_middle_proximal_joint",
"right_ring_proximal_joint",
"right_pinky_proximal_joint"
],
points: [{
positions: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
}]
}'
# 左手
ros2 topic pub --once /left_revo2_hand_controller/joint_trajectory \
trajectory_msgs/msg/JointTrajectory \
'{
joint_names: [
"left_thumb_proximal_joint",
"left_thumb_metacarpal_joint",
"left_index_proximal_joint",
"left_middle_proximal_joint",
"left_ring_proximal_joint",
"left_pinky_proximal_joint"
],
points: [{
positions: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
time_from_start: {sec: 1}
}]
}'测试脚本
功能包包含一个交互式测试脚本:
# 进入脚本目录
cd <package_path>/scripts/
# 交互式菜单
python3 test_revo2_ethercat.py --menu
# 直接测试命令
python3 test_revo2_ethercat.py --test all_fingers --amplitude 0.8
python3 test_revo2_ethercat.py --test individual
python3 test_revo2_ethercat.py --test home监控和调试
检查系统状态
# 列出所有运行的节点
ros2 node list
# 列出所有控制器
ros2 control list_controllers
# 检查硬件组件
ros2 control list_hardware_components
# 检查硬件接口
ros2 control list_hardware_interfaces
# 列出所有话题
ros2 topic list
# 列出所有动作
ros2 action list
# 监控关节状态
ros2 topic echo /joint_states预期的输出
核心节点列表(右手配置)
/controller_manager
/joint_state_broadcaster
/right_revo2_hand_controller
/robot_state_publisher控制器状态
joint_state_broadcaster joint_state_broadcaster/JointStateBroadcaster active
right_revo2_hand_controller joint_trajectory_controller/JointTrajectoryController active硬件组件(右手配置)
Hardware Component 1
name: Revo2RightEthercatSystem
type: system
plugin name: stark_ethercat_driver/EthercatDriver
state: id=3 label=active
command interfaces
right_thumb_proximal_joint/position [available] [claimed]
right_thumb_metacarpal_joint/position [available] [claimed]
right_index_proximal_joint/position [available] [claimed]
right_middle_proximal_joint/position [available] [claimed]
right_ring_proximal_joint/position [available] [claimed]
right_pinky_proximal_joint/position [available] [claimed]硬件接口(右手配置)
command interfaces
right_index_proximal_joint/position [available] [claimed]
right_middle_proximal_joint/position [available] [claimed]
right_pinky_proximal_joint/position [available] [claimed]
right_ring_proximal_joint/position [available] [claimed]
right_thumb_metacarpal_joint/position [available] [claimed]
right_thumb_proximal_joint/position [available] [claimed]
state interfaces
right_index_proximal_joint/effort
right_index_proximal_joint/position
right_index_proximal_joint/velocity
right_middle_proximal_joint/effort
right_middle_proximal_joint/position
right_middle_proximal_joint/velocity
right_pinky_proximal_joint/effort
right_pinky_proximal_joint/position
right_pinky_proximal_joint/velocity
right_ring_proximal_joint/effort
right_ring_proximal_joint/position
right_ring_proximal_joint/velocity
right_thumb_metacarpal_joint/effort
right_thumb_metacarpal_joint/position
right_thumb_metacarpal_joint/velocity
right_thumb_proximal_joint/effort
right_thumb_proximal_joint/position
right_thumb_proximal_joint/velocity核心话题列表(右手配置)
/joint_states
/right_revo2_hand_controller/joint_trajectory
/robot_description
/tf
/tf_static核心动作列表(右手配置)
/right_revo2_hand_controller/follow_joint_trajectory关节映射
右手关节
| 关节名称 | 描述 | 角度范围(弧度) | 最大角度(度) |
|---|---|---|---|
right_thumb_proximal_joint | 拇指近端关节 | 0 ~ 1.03 | 59 |
right_thumb_metacarpal_joint | 拇指掌骨关节 | 0 ~ 1.57 | 90 |
right_index_proximal_joint | 食指近端关节 | 0 ~ 1.41 | 81 |
right_middle_proximal_joint | 中指近端关节 | 0 ~ 1.41 | 81 |
right_ring_proximal_joint | 无名指近端关节 | 0 ~ 1.41 | 81 |
right_pinky_proximal_joint | 小指近端关节 | 0 ~ 1.41 | 81 |
左手关节
| 关节名称 | 描述 | 角度范围(弧度) | 最大角度(度) |
|---|---|---|---|
left_thumb_proximal_joint | 拇指近端关节 | 0 ~ 1.03 | 59 |
left_thumb_metacarpal_joint | 拇指掌骨关节 | 0 ~ 1.57 | 90 |
left_index_proximal_joint | 食指近端关节 | 0 ~ 1.41 | 81 |
left_middle_proximal_joint | 中指近端关节 | 0 ~ 1.41 | 81 |
left_ring_proximal_joint | 无名指近端关节 | 0 ~ 1.41 | 81 |
left_pinky_proximal_joint | 小指近端关节 | 0 ~ 1.41 | 81 |
功能包结构
brainco_hand_ethercat_driver/
├── launch/ # Launch 文件
│ ├── revo2_system.launch.py # 主系统启动文件
│ └── revo2_real_moveit.launch.py # MoveIt 集成启动文件
├── config/ # 配置文件
├── include/ # 头文件
│ └── revo2_ethercat_plugins/ # 插件头文件
├── src/ # 源文件
│ └── revo2_joints_system_slave.cpp # 硬件接口实现
├── scripts/ # 工具脚本
│ └── test_revo2_ethercat.py # 测试脚本
├── CMakeLists.txt # 构建配置
├── package.xml # 功能包描述
├── revo2_plugins.xml # 插件描述
└── README.md # 英文说明联系方式
如有问题或建议,请联系 BrainCo 开发团队或者通过页面帮助入口提交工单。