概述
BrainCo Revo 3 智能仿生灵巧手面向工业自动化、科研探索和机器人作业场景。单手集成 21 路独立驱动电机,实现 21 个主动自由度。设备支持 RS485 通信(默认波特率 5 Mbps)和 CAN FD(开发中)通信,并提供跨平台 C/C++、Python SDK,支持 Linux、macOS 和 Windows。
产品特色
- 21 自由度全主动仿生构型:内置 21 个独立电机,支持对指、侧摆和仿生手指运动,可用于多姿态抓握。全手关节支持反驱和关节级控制。
- 触觉反馈:部分配置集成分布式触觉阵列,支持接触状态感知,可用于易碎、柔性和不规则物体的抓取实验。
- 可靠性与环境测试:核心关节弯折寿命达 100 万次,并通过跌落碰撞、振动、承压、高低温工作及盐雾等可靠性测试。
- SDK 与机器人生态:提供 C/C++、Python SDK、ROS 支持和开源示例,用于机器人应用集成与模型迁移。
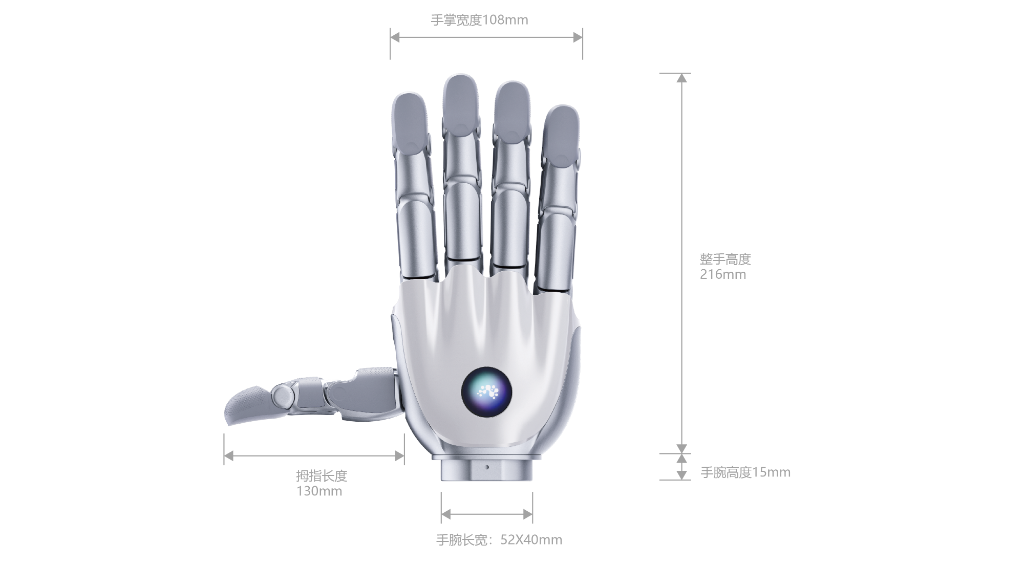
产品尺寸
产品参数
 标准款式:工业流光银(支持左/右手分型,支持批量定制)
标准款式:工业流光银(支持左/右手分型,支持批量定制)| 参数分类 | 参数项 | Revo 3 U21 | Revo 3 U21T | Revo 3 U21VT |
|---|---|---|---|---|
| 结构参数 | 总自由度 (主动自由度) | 21(21) | 21(21) | 21(21) |
| 反驱 | 全关节反驱 | 全关节反驱 | 全关节反驱 | |
| 整手高度 | 216mm | 216mm | 216mm | |
| 手掌宽度 | 108mm | 108mm | 108mm | |
| 运动范围 | 最大抓握直径 | >150mm | >150mm | >150mm |
| 最小抓握直径 | <10mm | <10mm | <10mm | |
| 五指捏合 | 四指 / 拇指均可触掌 Kapandij 对指测试满分 | 四指 / 拇指均可触掌 Kapandij 对指测试满分 | 四指 / 拇指均可触掌 Kapandij 对指测试满分 | |
| 工作性能 | 供应电压 | 24-80V | 24-80V | 24-80V |
| 最大电流 | 10A(24V) | 10A(24V) | 10A(24V) | |
| 最大主动握力 | 70N | 70N | 70N | |
| 指尖最大捏力 | 20N | 20N | 20N | |
| 整手负载 | 20kg | 20kg | 20kg | |
| 四指负载 | 5kg | 5kg | 5kg | |
| 重复运动精度 | 0.1° | 0.1° | 0.1° | |
| 运动速度 | 3Hz | 3Hz | 3Hz | |
| 通信控制 | 通讯接口 | EtherCAT (开发中) CAN FD (开发中) RS485 | EtherCAT (开发中) CAN FD (开发中) RS485 | EtherCAT (开发中) CAN FD (开发中) RS485 |
| 通讯频率 | 500Hz | 500Hz | 500Hz | |
| 控制模式 | 位置控制、MIT力位控制、导纳控制、零力矩模式 | 位置控制、MIT力位控制、导纳控制、零力矩模式 | 位置控制、MIT力位控制、导纳控制、零力矩模式 | |
| 触觉模块 | 触觉分布 | / | 整手触觉 | 整手触觉(指尖视触觉) |
| 分辨率 | / | 0.01N | 0.01N | |
| 量程 | / | 0-25N | 0-25N | |
| 最小可测形变 | / | / | 130微米 |
注:更多自由度信息,敬请期待。
参数说明
自由度分布
Revo3 智能灵巧手共配置 21 个全主动独立驱动自由度,各手指关节严格遵循人手结构划分,仿生度高: 大拇指(Thumb) 搭载 5 个主动自由度,分别为指尖屈伸(IP)、指根屈伸(MCP)、腕掌关节长轴自转对掌(CMC Rot)、腕掌关节外展内收(CMC Abd)、腕掌关节屈伸(CMC Flex);支持拇指对掌、对指、捏持等姿态。 食指(Index)、中指(Middle)、无名指(Ring)、小拇指(Pinky) 各搭载 4 个主动自由度,由指根至指尖依次为:侧摆展收(Abd)、掌指关节屈伸(MCP)、近端指间关节屈伸(PIP)、远端指间关节屈伸(DIP),可实现独立分指、协同抓握与类人精细操作。
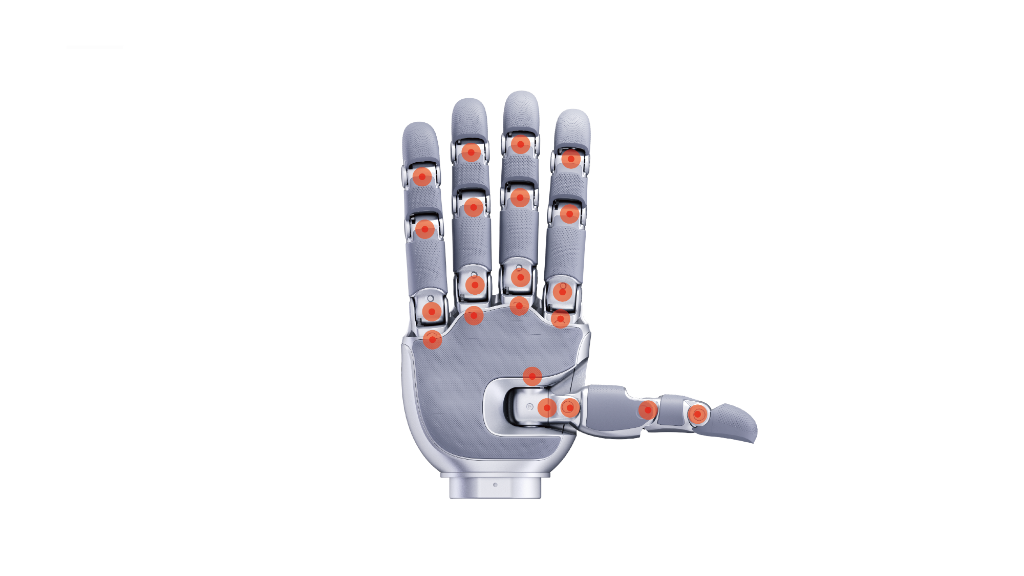 Revo 3 灵巧手 21 个全主动独立驱动自由度(电机)的物理分布位置示意图
Revo 3 灵巧手 21 个全主动独立驱动自由度(电机)的物理分布位置示意图运动角度范围
各主动关节与自由度的物理可达运动角度范围如下表所示:
| 主动关节 | 自由度 | 角度最小值 | 角度最大值 |
|---|---|---|---|
| 大拇指 (Thumb) | IP 指尖屈伸 | 0° | 85° |
| MCP 指根屈伸 | 0° | 85° | |
| CMC Rot 腕掌关节自转对掌 | 0° | 105° | |
| CMC Abd 腕掌关节外展内收 | 0° | 110° | |
| CMC Flex 腕掌关节屈伸 | 0° | 60° | |
| 食指 (Index) | Abd 侧摆展收 | -10° | 30° |
| MCP 掌指关节屈伸 | 0° | 85° | |
| PIP 近端指间关节屈伸 | 0° | 85° | |
| DIP 远端指间关节屈伸 | 0° | 85° | |
| 中指 (Middle) | Abd 侧摆展收 | -20° | 25° |
| MCP 掌指关节屈伸 | 0° | 85° | |
| PIP 近端指间关节屈伸 | 0° | 85° | |
| DIP 远端指间关节屈伸 | 0° | 85° | |
| 无名指 (Ring) | Abd 侧摆展收 | -25° | 20° |
| MCP 掌指关节屈伸 | 0° | 85° | |
| PIP 近端指间关节屈伸 | 0° | 85° | |
| DIP 远端指间关节屈伸 | 0° | 85° | |
| 小拇指 (Pinky) | Abd 侧摆展收 | -30° | 10° |
| MCP 掌指关节屈伸 | 0° | 85° | |
| PIP 近端指间关节屈伸 | 0° | 85° | |
| DIP 远端指间关节屈伸 | 0° | 85° |
控制模式说明
| 控制模式 | 目标参数 | 详细说明 |
|---|---|---|
| 电流模式 | 目标电流 | 电流闭环控制模式。控制器设定电机输出电流,不启用位置或速度闭环约束。该模式下关节可随外力被动运动,适用于柔顺交互、外力示教、零阻力拖拽和柔性物体贴合等场景。 |
| 位置(轨迹)模式 | 目标位置、Kp、Kd | 基于轨迹规划的位置闭环控制模式。控制器根据目标位置生成加减速轨迹,并配合 Kp、Kd 参数修正位置偏差、降低运动振荡。适用于固定手势复现、对位和匀速运动等场景。 |
| MIT模式 | 目标位置、目标速度、前馈力矩、Kp、Kd | 使用目标位置、目标速度、前馈力矩、刚度和阻尼输入的混合控制模式。控制器根据目标状态和 Kp/Kd 参数计算力矩输出。适用于接触交互、自适应抓握、操作策略测试和强化学习实验。 |
注:更多控制模式敬请期待。
设备 ID 说明
在 RS485 总线网络拓扑中,二代与三代灵巧手默认左手 ID 均为 126,右手 ID 均为 127,广播 ID 为 0。在多设备连接时,开发者需要配置唯一的设备 ID 来区分并独立控制左/右手灵巧手;而向广播 ID 0 发送指令则会同步控制总线上所有的灵巧手设备。
开机复位说明
开机自复位是指灵巧手在上电后自动执行位置校准,上电后灵巧手将查找手指起始位置,在此期间所有的手指都会被打开。
⚠️ 开机校准安全注意事项
- Note1: 在位置校准的过程中,如果灵巧手有抓握物体,则可能存在跌落的风险。
- Note2: 在灵巧手上电后,必须执行一次位置校准,才能正常控制。
通信接口说明
Revo 3 灵巧手通过 RS485 和 CAN FD(开发中)接口进行数据交互与控制。

物理接插件接口定义
| 接口 | 接插件型号 | 说明 |
|---|---|---|
| 485 | A1257WV-S-2P-6T | RS485 通讯接口 |
| CAN FD | A1257WV-S-2P-6T | CAN FD 通讯接口(开发中) |
| EtherCAT | A1257WV-S-5P-6T | EtherCAT 通讯接口 |
| VCC | XT30UPB-M | 主电源供电接口 |
| VBTS | A1257WV-S-10P | 触觉/传感器数据传输等扩展接口 |
在物理接线与调试时,请务必关注以下电气保障事项:
🔌 供电与总线安全保障
- 供电功率:由于内部集成了 21 个独立电机,在多指同时受力或处于大电流抓握时,瞬时电流会增加。请使用 24V 稳定直流电源 供电,并确保供电电源的额定功率在 100W 以上,以降低电压跌落风险。
- 总线接线:在 5M 波特率下,请确保 RS485 总线使用双绞屏蔽线,并尽可能缩短接线长度,以减少反射干扰。