Overview
BrainCo Revo 3 dexterous hand is designed for industrial automation, research, and robotic manipulation scenarios. It integrates 21 independent motors with 21 active degrees of freedom in a compact bionic form factor. The system supports RS485 communication at a default baud rate of 5 Mbps and CAN FD (in development) communication. Cross-platform C/C++ and Python SDKs are provided for Linux, macOS, and Windows.
Product Features
- 21 DoF Fully Active Bionic Configuration: Integrates 21 independent motors for opposition, lateral abduction/adduction, and bionic finger motion. It supports multi-pose grasping, back-drivable joints, and joint-level control.
- Tactile Feedback: Selected configurations include a distributed tactile array for contact state sensing, which can be used for grasping fragile, soft, and irregular objects.
- Reliability & Environment Testing: Joint flexing lifetime exceeds 1,000,000 cycles. The device has been tested for drop collision, vibration, static pressure, high/low temperature operation, and salt spray.
- SDK & Robotics Ecosystem: Provides C/C++ and Python SDKs, ROS support, and open-source demos for robot application integration and model transfer.
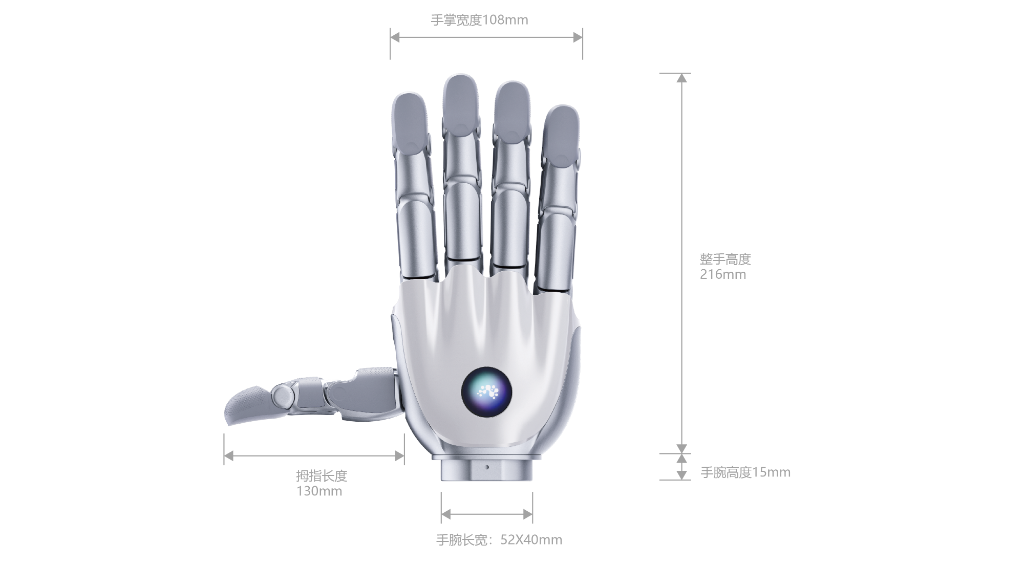
Product Dimensions
Product Parameters
 Standard styles: Bionic Silver (supporting Left/Right hands laterality, customizable in bulk)
Standard styles: Bionic Silver (supporting Left/Right hands laterality, customizable in bulk)| Classification | Specification Item | Revo 3 U21 | Revo 3 U21T | Revo 3 U21VT |
|---|---|---|---|---|
| Structural Parameters | Degrees of Freedom (Active DoF) | 21 (21) | 21 (21) | 21 (21) |
| Back-drivability | Fully back-drivable joints | Fully back-drivable joints | Fully back-drivable joints | |
| Hand Height | 216mm | 216mm | 216mm | |
| Palm Width | 108mm | 108mm | 108mm | |
| Motion Range | Max Grasping Diameter | >150mm | >150mm | >150mm |
| Min Grasping Diameter | <10mm | <10mm | <10mm | |
| Five-finger Pinch | Four fingers / Thumb can touch palm Kapandji opposition test supported | Four fingers / Thumb can touch palm Kapandji opposition test supported | Four fingers / Thumb can touch palm Kapandji opposition test supported | |
| Operating Performance | Supply Voltage | 24-80V | 24-80V | 24-80V |
| Max Current | 10A(24V) | 10A(24V) | 10A(24V) | |
| Max Active Grip Force | 70N | 70N | 70N | |
| Max Fingertip Pinch Force | 20N | 20N | 20N | |
| Total Hand Load | 20kg | 20kg | 20kg | |
| Four-finger Load | 5kg | 5kg | 5kg | |
| Repeatability | 0.1° | 0.1° | 0.1° | |
| Motion Speed | 3Hz | 3Hz | 3Hz | |
| Communication & Control | Comm Interface | EtherCAT (In development) CAN FD (In development) RS485 | EtherCAT (In development) CAN FD (In development) RS485 | EtherCAT (In development) CAN FD (In development) RS485 |
| Comm Frequency | 500Hz | 500Hz | 500Hz | |
| Control Modes | Position, MIT Force/Position, Admittance & Zero-Torque Modes | Position, MIT Force/Position, Admittance & Zero-Torque Modes | Position, MIT Force/Position, Admittance & Zero-Torque Modes | |
| Tactile Module | Tactile Distribution | / | Full-hand tactile | Full-hand tactile (fingertip vision-tactile) |
| Force Resolution | / | 0.01N | 0.01N | |
| Force Range | / | 0-25N | 0-25N | |
| Min Detectable Deformation | / | / | 130 μm |
Note: Stay tuned for more DoF configurations.
Parameter Description
Degrees of Freedom Distribution
The Revo 3 smart dexterous hand features 21 fully active, independently driven degrees of freedom (DoF). The joint configuration strictly adheres to human anatomical structures, providing a high level of biomimetic fidelity:
- The Thumb is equipped with 5 active DoF: Interphalangeal flexion/extension (IP), Metacarpophalangeal flexion/extension (MCP), Carpometacarpal axial rotation for opposition (CMC Rot), Carpometacarpal abduction/adduction (CMC Abd), and Carpometacarpal flexion/extension (CMC Flex). This supports thumb opposition, pinch, and power grasp postures.
- The Index, Middle, Ring, and Pinky fingers each feature 4 active DoF. From base to tip, these are: Abduction/adduction (Abd), Metacarpophalangeal flexion/extension (MCP), Proximal Interphalangeal flexion/extension (PIP), and Distal Interphalangeal flexion/extension (DIP), enabling independent finger movement, collaborative grasping, and human-like fine manipulation.
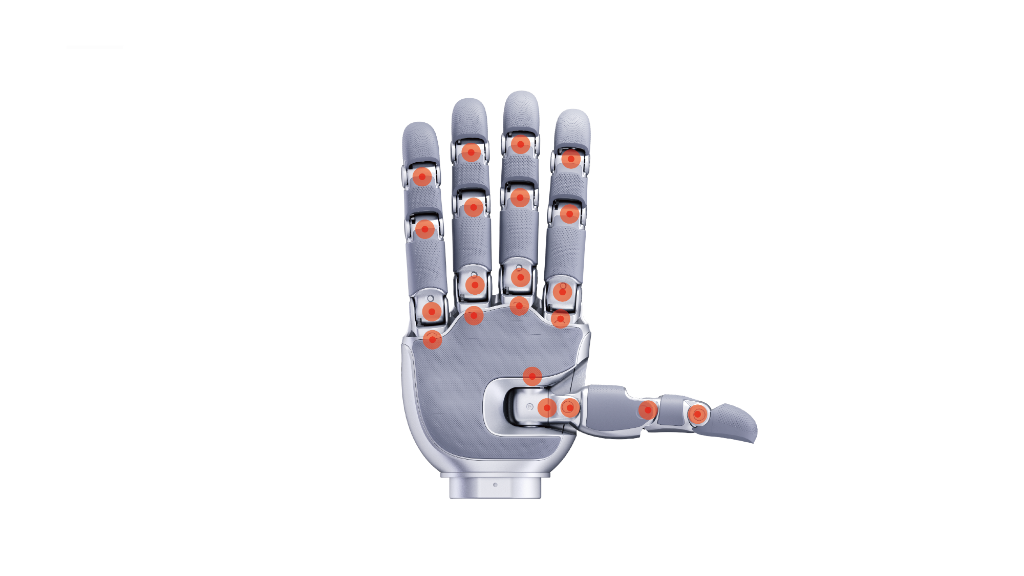 Physical distribution diagram of the 21 fully active independently driven degrees of freedom (motors) of the Revo 3 smart dexterous hand
Physical distribution diagram of the 21 fully active independently driven degrees of freedom (motors) of the Revo 3 smart dexterous handJoint Motion Range
The physical achievable joint motion range (corresponding to the physical float parameters in the SDK interface) for each joint is listed in the table below:
| Active Joint | Degree of Freedom (DoF) | Min Angle | Max Angle |
|---|---|---|---|
| Thumb | IP Interphalangeal Flexion | 0° | 85° |
| MCP Metacarpophalangeal Flexion | 0° | 85° | |
| CMC Rot Carpometacarpal Rotation | 0° | 105° | |
| CMC Abd Carpometacarpal Abduction | 0° | 110° | |
| CMC Flex Carpometacarpal Flexion | 0° | 60° | |
| Index | Abd Abduction/Adduction | -10° | 30° |
| MCP Metacarpophalangeal Flexion | 0° | 85° | |
| PIP Proximal Interphalangeal Flexion | 0° | 85° | |
| DIP Distal Interphalangeal Flexion | 0° | 85° | |
| Middle | Abd Abduction/Adduction | -20° | 25° |
| MCP Metacarpophalangeal Flexion | 0° | 85° | |
| PIP Proximal Interphalangeal Flexion | 0° | 85° | |
| DIP Distal Interphalangeal Flexion | 0° | 85° | |
| Ring | Abd Abduction/Adduction | -25° | 20° |
| MCP Metacarpophalangeal Flexion | 0° | 85° | |
| PIP Proximal Interphalangeal Flexion | 0° | 85° | |
| DIP Distal Interphalangeal Flexion | 0° | 85° | |
| Pinky | Abd Abduction/Adduction | -30° | 10° |
| MCP Metacarpophalangeal Flexion | 0° | 85° | |
| PIP Proximal Interphalangeal Flexion | 0° | 85° | |
| DIP Distal Interphalangeal Flexion | 0° | 85° |
Control Modes
| Control Mode | Target Parameters | Detailed Description |
|---|---|---|
| Current Mode | Target Current | Current closed-loop control. The controller sets motor output current without position or velocity closed-loop constraints. In this mode, the joints can move passively under external force. It is suitable for compliant interaction, physical teaching, zero-resistance dragging, and adaptive wrapping of flexible objects. |
| Position (Trajectory) Mode | Target Position, Kp, Kd | Position closed-loop control based on trajectory planning. The controller generates acceleration/deceleration trajectories from target positions and uses Kp/Kd parameters to correct position error and reduce oscillation. It is suitable for fixed gesture replay, alignment, and constant-speed motion. |
| MIT Mode | Target Position, Target Velocity, Feedforward Torque, Kp, Kd | Hybrid control using position, velocity, feedforward torque, stiffness, and damping inputs. The controller computes torque from the target state and Kp/Kd parameters. It is suitable for contact interaction, adaptive grasping, manipulation policy testing, and reinforcement learning experiments. |
Note: Stay tuned for more control modes.
Device ID Specifications
In the RS485 bus network topology, the default Left Hand ID for both Revo 2 and Revo 3 dexterous hands is 126, the default Right Hand ID is 127, and the Broadcast ID is 0.
In the network bus topology, developers can configure unique IDs to identify and control the left and right hands separately. Sending instructions to Broadcast ID 0 will control all dexterous hands on the bus simultaneously.
Power-On Reset & Calibration
Power-on self-reset refers to the dexterous hand automatically executing physical position calibration upon power-on. The system will search for the starting position of each finger, and all fingers will open during this period.
⚠️ Critical Safety Notes for Power-On Calibration
- Note 1 (Drop Risk): During the process of position calibration, if the hand is holding any object, there is a potential risk of the object falling.
- Note 2 (Control Prerequisite): After the hand is powered on, a position calibration must be executed once before it can be controlled normally.
Communication Interface
The Revo 3 dexterous hand communicates and is controlled via RS485 and CAN FD (in development) interfaces.

Physical Connector Specifications
| Interface | Connector Model | Description |
|---|---|---|
| 485 | A1257WV-S-2P-6T | RS485 communication interface |
| CAN FD | A1257WV-S-2P-6T | CAN FD communication interface (in development) |
| EtherCAT | A1257WV-S-5P-6T | EtherCAT communication interface |
| VCC | XT30UPB-M | Main power supply interface |
| VBTS | A1257WV-S-10P | Tactile/sensor data transmission expansion interface |
When performing physical wiring and debugging, please pay close attention to the following guidelines:
🔌 Power Supply & Bus Security
- Power Budget: Since the Revo 3 integrates 21 independent motors, instantaneous current can be high under heavy loads or when multiple fingers are gripping. Use a stable 24V DC power supply with a power rating of at least 100W to reduce voltage drop risk.
- Bus Wiring: At 5M baud rate, use shielded twisted pair cables for the RS485 bus and keep the wiring length as short as possible to reduce signal reflection and noise.