Overview
BrainCo Revo 2 is a bionic dexterous hand for robot integration and research. It provides 6 active joints and 11 degrees of freedom, supports RS485, CAN FD, and EtherCAT communication interfaces, and provides SDK support for Linux, Windows, and ROS workflows. The device includes closed-loop servo control, custom gesture definitions, and protections for current, stall, high temperature, and collision conditions.
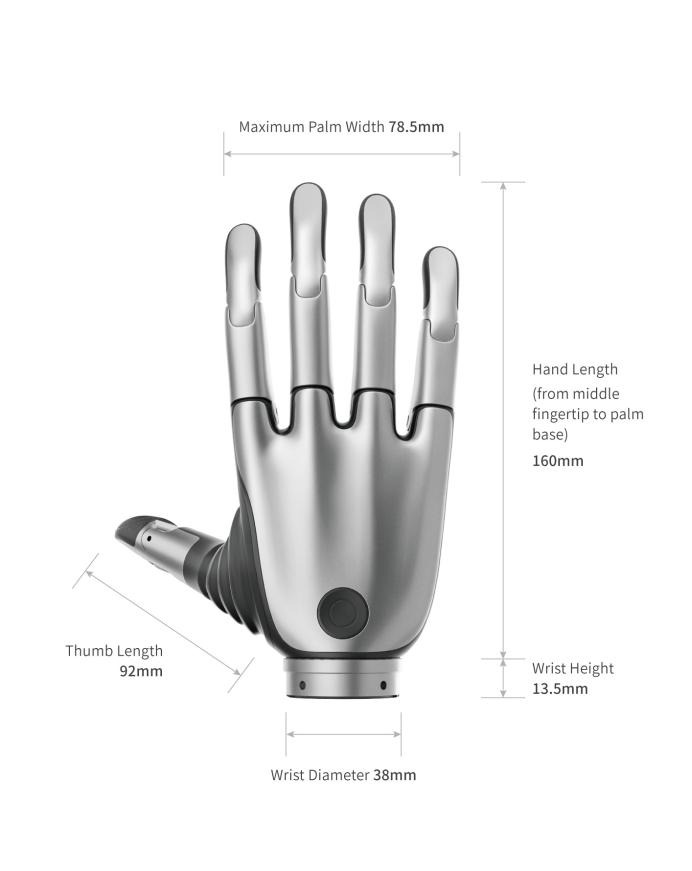
Product size
Product parameters
| Product name | Product rendering image | |||
|---|---|---|---|---|
| Biomimetic dexterous hand Revo 2 |     | |||
| Standard colors: Space Gray, Silver (supports bulk color customization) | ||||
| Model | BASIC | PRO | TOUCH | |
| Version code | XRL/XRR | XEL/XER | XTL/XTR | |
| Main parameters | degree of freedom | 11(6 active) | ||
| Weight | 383 g | |||
| Height (from the base of the palm to the tip of the middle finger) | 160 mm | |||
| Full fist grip force | ≥50N | |||
| Pinch force | ≥15N | |||
| Max Payload | ≥20kg | |||
| Operating Noise (at 50cm) | ≤50dB | |||
| Flexion/Extension Speed | ≤0.65s | |||
| Communication interface | 485 CANfd | 485 CANfd EtherCAT | 485 CANfd EtherCAT | |
| Supply voltage | 12-28V | 12-64V | 12-64V | |
| Static Current | 65 mA @24V | 115 mA @24V | 115 mA @24V | |
| No-load Average Current (five-finger flexion and extension) | 350mA @24V | 390mA @24V | 390mA @24V | |
| Maximum Current | 4.6 A @24V | 4.65A @24V | 4.65A @24V | |
| Repetitive control precision | 0.1° | 0.1° | 0.1° | |
| Maximum opening and closing distance | 100mm(from thumb to index finger) | |||
| Operating temperature | -10 - 40℃ / 90%RH | |||
| Tactile module | / | Multi-dimensional fingertip tactile module | ||
| Smart Control | Position, velocity, current feedback control Cascaded control, compliance control | Position, velocity, current feedback control Cascaded control, compliance control Tactile Adaptive Control | ||
| Smart Protection | Current protection, stall protection, high-temperature protection, anti-collision protection | |||
| SDK integration | SDK supports Python/C and is compatible with Linux/Windows/ROS systems. | |||
| Online upgrade | Support OTA online upgrades | |||
Parameter description
Degree of freedom distribution
The Revo 2 dexterous hand has 6 active joints and a total of 11 degrees of freedom. The thumb has two active degrees of freedom for abduction and adduction, as well as one passive degree of freedom for flexion and extension, while each of the remaining four fingers has one active degree of freedom for flexion and extension and one passive degree of freedom for flexion and extension.

Range of motion
| Active Joint | Degrees of Freedom | Minimum Angle (°) | Maximum Angle (°) |
|---|---|---|---|
| Thumb Flex | Flexion/Extension | 0 | 59 |
| Thumb Aux | Adduction/Abduction | 0 | 90 |
| Index Finger | Flexion/Extension | 0 | 81 |
| Middle Finger | Flexion/Extension | 0 | 81 |
| Ring Finger | Flexion/Extension | 0 | 81 |
| Little Finger | Flexion/Extension | 0 | 81 |
Definition of the back of hand light status
| Light Effect | Description |
|---|---|
| Green light blinking | Powering on (not completed reset) |
| Green light solid | Normal operation (reset completed) |
| Yellow light blinking | Power supply too low |
| Cyan light solid | OTA upgrading in progress |
| Red light solid | Abnormal |
Back of hand button function description
| Function | Button |
|---|---|
| Reset | Short press |
| Restore factory settings | Long press for 5 seconds |
| Fist gesture | Short press 2 times |
Motor ID and status
| Motor ID | Description |
|---|---|
| FINGERID_THUMB | Thumb Flex |
| FINGERID_THUMB_AUX | Thumb Aux |
| FINGERID_INDEX | Index |
| FINGERID_MIDDLE | Middle |
| FINGERID_RING | Ring |
| FINGERID_PINKY | Pinky |
| Motor status | Description |
|---|---|
| MOTOR_IDLE | Joint Idle |
| MOTOR_RUNNING | Joint Running |
| MOTOR_STALL | Joint Stall |
| MOTOR_TURBO | turbo |
Control Mode Description
| Mode Value | Control Mode | Description |
|---|---|---|
| 1 | Position + Time | Move to the target position within the specified duration time. If the time is set to 0, it operates at maximum speed. |
| 2 | Position + Speed | Move to the target position at the specified speed limit. If the speed is set to 0, it operates at maximum speed. |
| 3 | Speed | Move continuously at the target speed until a limit is reached or a physical stall occurs. |
| 4 | Current | Maintain the target current continuously until a limit is reached or a physical stall occurs. |
| 5 | PWM | Maintain the target PWM duty cycle continuously until a limit is reached or a physical stall occurs. |
Turbo Mode Description
Turbo mode is based on stall detection. When a finger stalls against an object, it pauses for the configured stall duration and then continues gripping at 500 ms intervals. This mode can be used when the hand needs to maintain grip on soft or shifting objects.
Device ID description
For Revo 2, default ID for the left hand is 126, and for the right hand, it is 127. Users can modify them within the range of 1 - 254.
Description of the power-on auto-calibration process
The automatic reset upon powering on refers to the dexterous hand automatically executing a position calibration sweep after being powered on. Upon startup, the dexterous hand will search for the starting origin bounds of the fingers, during which all fingers will be set in motion.
Note 1: During the position calibration process, if the dexterous hand is currently gripping an object, it will drop the object.
Note 2: After the dexterous hand is powered on, position calibration must be completed successfully before normal control is permitted.
Communication interface description
Revo 2 Basic
The basic version of the second-generation hand can communicate and control via the 485 or CAN FD communication interface. The interface is located under the wrist, and the connector model is BM05B-PASS-TFT(LF)(SN)。

Revo 2 Pro&Touch
The second generation hand advanced version and tactile version support three communication interfaces: 485/CAN FD/EtherCAT for communication and control, with the interface located below the wrist.

| Interface | Connector Model |
|---|---|
| 485 | A1257WV-S-2P-6T |
| CAN FD | A1257WV-S-2P-6T |
| EtherCAT | A1257WV-S-5P-6T |
| VCC | XT30UPB-M |